Los robots humanoides se están convirtiendo rápidamente en una realidad. Los construidos sobre NVIDIA Isaac GR00T ya están aprendiendo a caminar, manipular objetos e interactuar con el mundo real.
La recopilación de conjuntos de datos diversos y grandes para entrenar estas sofisticadas máquinas puede llevar mucho tiempo y ser costosa. Mediante el uso de datos sintéticos (SDG), generados a partir de gemelos digitales físicamente precisos, los investigadores y desarrolladores pueden entrenar y validar sus modelos de IA en simulación antes de su implementación en el mundo real.
Universal Scene Description, también conocido como OpenUSD, es un poderoso framework que facilita la construcción de estos entornos virtuales físicamente precisos. Una vez que se construyen los entornos 3D, OpenUSD permite a los equipos desarrollar simulaciones detalladas y escalables junto con escenarios realistas donde los robots pueden practicar, aprender y mejorar sus habilidades.
Estos datos sintéticos son esenciales para que los robots humanoides aprendan comportamientos similares a los humanos, como caminar, agarrar objetos y navegar por entornos complejos. OpenUSD está mejorando el desarrollo de robots humanoides y allanando el camino para un futuro en el que estas máquinas puedan integrarse sin problemas en la vida diaria de las personas.
La plataforma NVIDIA Omniverse, impulsada por OpenUSD, proporciona a los desarrolladores una forma de unificar activos 3D de fuentes dispares, como 3DCAD y herramientas de creación de contenido digital (DCC). Esto les permite crear entornos virtuales 3D a gran escala y ejecutar simulaciones complejas para entrenar a sus robots, lo que agiliza todo el proceso y ofrece formas más rápidas y rentables de colaborar y desarrollar IA física.
Avance en el Entrenamiento de Robots con Datos de Movimiento Sintéticos
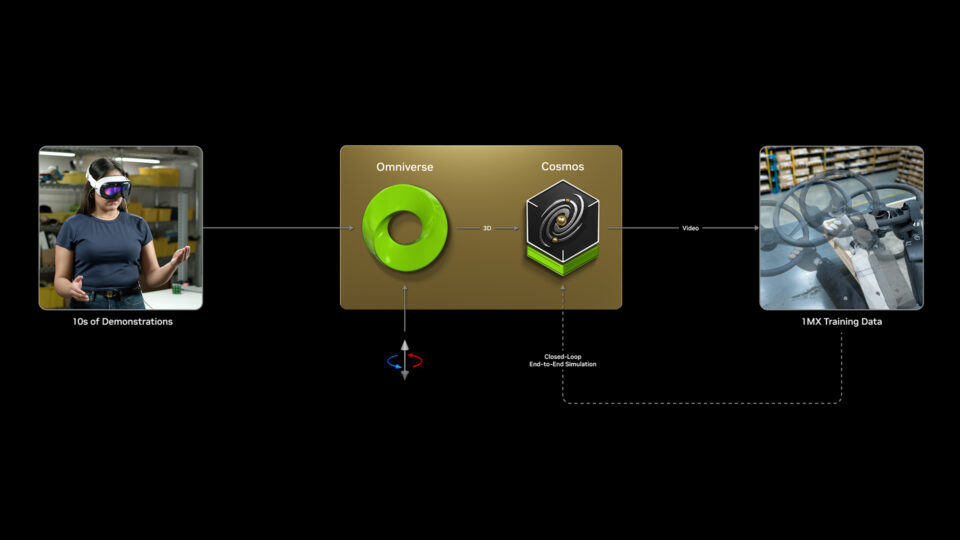
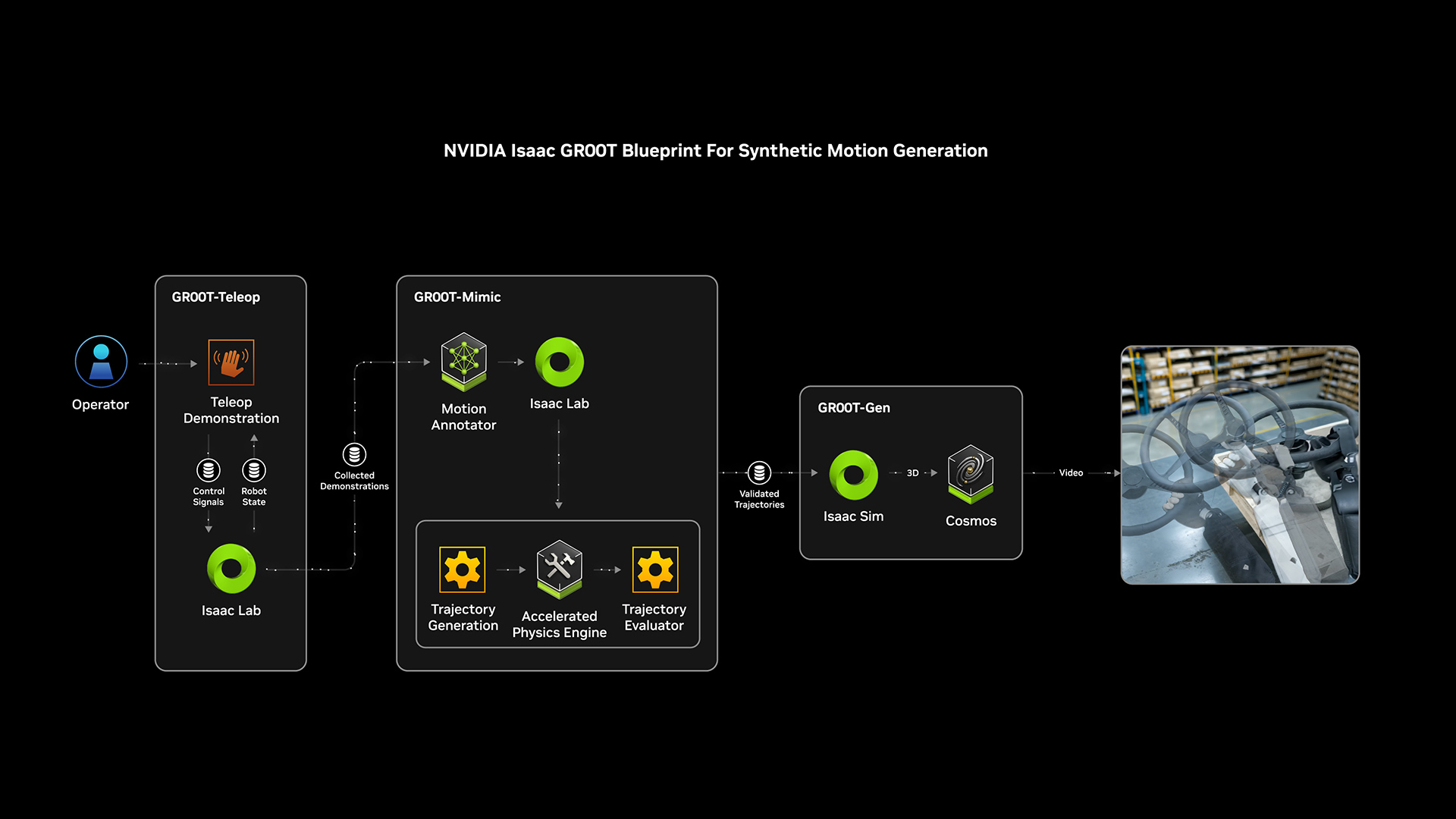
En el CES del Enero pasado, NVIDIA anunció el Isaac GR00T Blueprint para la generación de movimiento sintético para ayudar a los desarrolladores a generar conjuntos de datos de movimiento sintético exponencialmente más grandes para entrenar humanoides utilizando el aprendizaje por imitación.
Los aspectos más destacados del lanzamiento incluyen:
- Generación de Datos de Movimiento a Gran Escala: utiliza técnicas de simulación e IA generativa para generar conjuntos de datos exponencialmente grandes y diversos de movimientos similares a los humanos, lo que acelera el proceso de recopilación de datos.
- Aumento de Datos Más Rápido: los world foundation models de NVIDIA Cosmos generan videos fotorrealistas a escala utilizando la simulación real de Omniverse. Esto equipa a los desarrolladores para aumentar los conjuntos de datos sintéticos más rápido, para entrenar modelos físicos de IA, lo que reduce la brecha entre la simulación y la realidad.
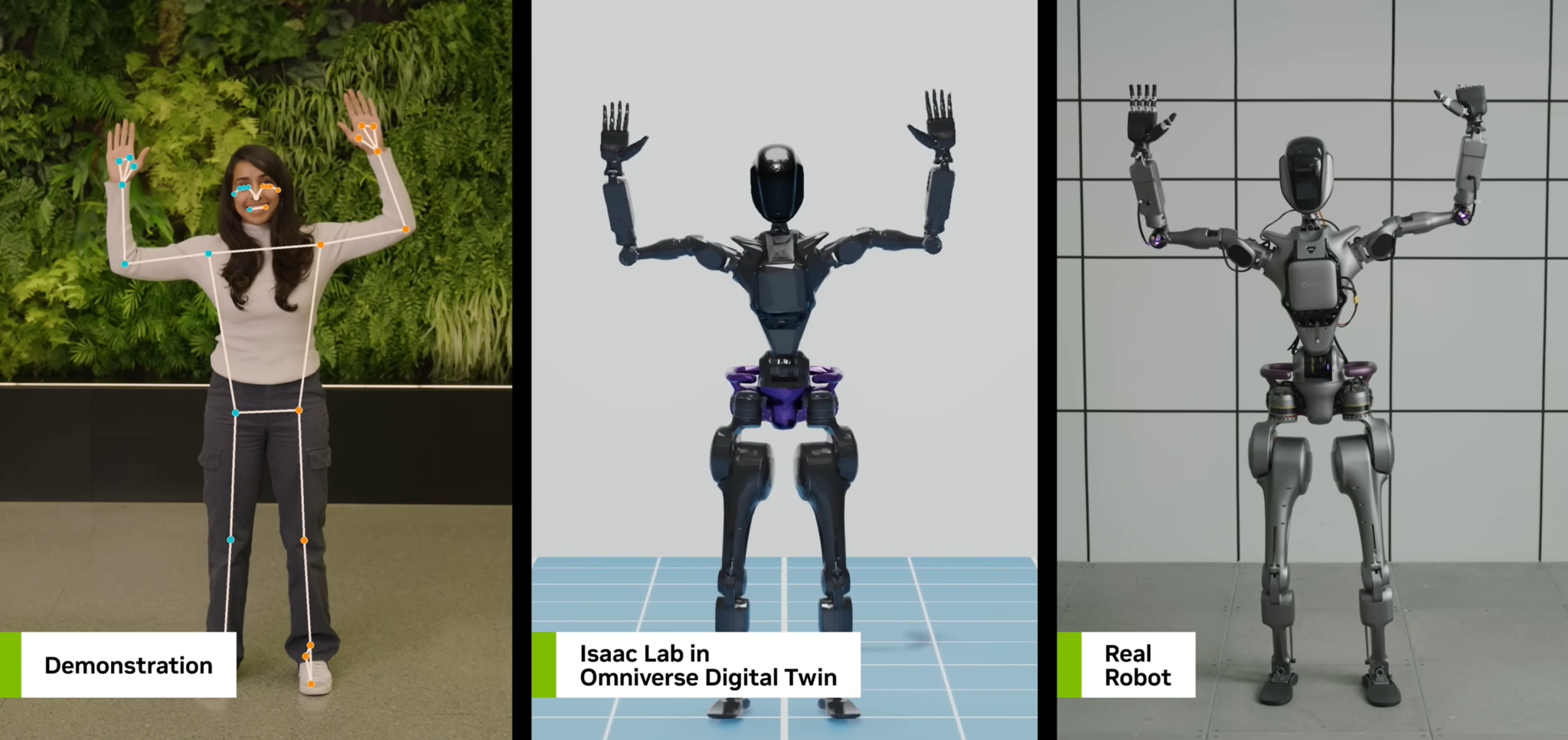
- Entrenamiento que Prioriza la Simulación: En lugar de depender únicamente de las pruebas del mundo real, los desarrolladores pueden entrenar robots en entornos virtuales, lo que hace que el proceso sea más rápido y rentable.
- Puente Entre lo Virtual y la Realidad: La combinación de datos reales y sintéticos, junto con la formación y las pruebas basadas en simulaciones, permite a los desarrolladores transferir las habilidades de los robots aprendidas en el mundo virtual al mundo real sin problemas.
Simulando el Futuro de la Robótica
Los robots humanoides están mejorando la eficiencia, la seguridad y la adaptabilidad en industrias como la manufactura, el almacén y la logística, y el área de la salud, al automatizar tareas complejas y aumentar las condiciones de seguridad para los trabajadores humanos.
Las principales empresas de robótica, como Boston Dynamics y Figure, ya han comenzado a adoptar y demostrar resultados con Isaac GR00T.
Scaled Foundations está reduciendo la barrera para el desarrollo de la robótica en todos los formatos, desde los brazos robóticos hasta los humanoides. La plataforma Open GRID de la compañía, que tiene integraciones con NVIDIA Isaac Sim, proporciona a los desarrolladores una forma simplificada de simular robots a través de un entorno de desarrollo fácil de usar y basado en navegador.
Conéctate al Mundo de OpenUSD
Más información sobre OpenUSD, robots humanoides y los últimos avances de IA en NVIDIA GTC, una conferencia mundial de IA que se celebraró del 17 al 21 de marzo en San José, California.
Aprenda a usar USD y continúe optimizando los workflows 3D con el nuevo plan de estudios Learn OpenUSD para desarrolladores y profesionales de 3D, disponible de forma gratuita a través del NVIDIA Deep Learning Institute. Para obtener más recursos sobre OpenUSD, explore el foro de Alliance for OpenUSD y el sitio web de AOUSD.
Mantente al día suscribiéndote a las noticias de NVIDIA.