Con un conocimiento detallado del mundo y todo lo que hay en él, los mapas proporcionan la previsión que utiliza la IA para tomar decisiones de conducción avanzadas y seguras.
En su presentación de apertura de GTC, el fundador y CEO de NVIDIA, Jensen Huang, presentó NVIDIA DRIVE Map, una plataforma de mapeo multimodal diseñada para permitir los niveles más altos de autonomía y mejorar la seguridad. Combina la precisión del mapeo de encuestas DeepMap con la frescura y la escala del mapeo colaborativo basado en IA.
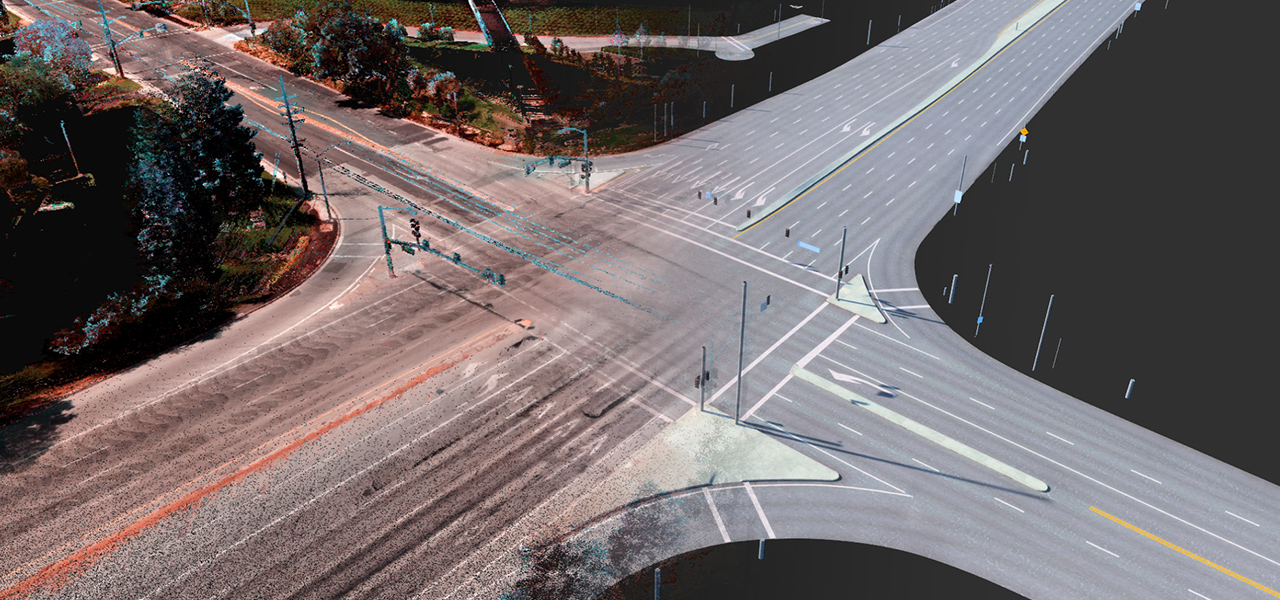
Con tres capas de localización (cámara, lidar y radar), DRIVE Map proporciona la redundancia y la versatilidad que requieren los controladores de IA más avanzados.
DRIVE Map proporcionará una cobertura cartográfica de la realidad del terreno a nivel de estudio a 500 000 kilómetros de carreteras en América del Norte, Europa y Asia para 2024. Este mapa se actualizará y ampliará continuamente con millones de vehículos de pasajeros.
NVIDIA DRIVE Map está disponible para toda la industria de vehículos autónomos.
Multicapa
DRIVE Map contiene múltiples capas de localización de datos para usar con modalidades de cámara, radar y lidar. El controlador de IA puede localizar cada capa del mapa de forma independiente, proporcionando la diversidad y la redundancia necesarias para los más altos niveles de autonomía.
La capa de localización de la cámara consta de atributos de mapa, como divisores de carril, marcas viales, límites de carreteras, semáforos, señales y postes.
La capa de localización de radar es un cloud de puntos agregado de retornos de radar. Es particularmente útil en condiciones de poca iluminación, que son un desafío para las cámaras, y en condiciones climáticas adversas, que son un desafío para las cámaras y los lidar.
La localización de radar también es útil en áreas suburbanas donde los atributos de mapa típicos no están disponibles, lo que permite que el controlador de IA localice en función de los objetos circundantes que generan un retorno de radar.
La capa de vóxel lidar proporciona la representación más precisa y fiable del entorno. Construye una representación 3D del mundo con una resolución de 5 centímetros, una precisión imposible de lograr con una cámara y un radar.
Una vez localizada en el mapa, la IA puede usar la información semántica detallada proporcionada por el mapa para planificar con anticipación y tomar decisiones de conducción de manera segura.
Lo Mejor de Ambos mMundos
DRIVE Map está construido con dos motores de mapas: un motor de mapas de estudio de la verdad sobre el terreno y un motor de mapas de colaboración colectiva, para recopilar y mantener una memoria colectiva de una flota a escala terrestre.
Este enfoque único combina lo mejor de ambos mundos, logrando una precisión de nivel centimétrico con vehículos topográficos dedicados, así como la frescura y la escala que solo se puede lograr con millones de vehículos de pasajeros actualizando y ampliando continuamente el mapa.
El motor de verdad sobre el terreno se basa en el motor de mapas topográficos DeepMap, una tecnología comprobada que se ha desarrollado y verificado durante los últimos seis años.
El motor de crowdsource basado en inteligencia artificial recopila actualizaciones de mapas de millones de automóviles y carga constantemente nuevos datos en el cloud a medida que conducen los vehículos. Luego, los datos se agregan con total fidelidad en NVIDIA Omniverse y se utilizan para actualizar el mapa, proporcionando a la flota del mundo real actualizaciones de mapas por aire en cuestión de horas.
DRIVE Map también proporciona una interfaz de datos, DRIVE MapStream, para permitir que cualquier automóvil de pasajeros que cumpla con los requisitos de DRIVE Map actualice continuamente el mapa utilizando datos de cámara, radar y lidar.
Digital Twin a Ecala Terrestre
Además de ayudar a la IA a tomar decisiones de conducción óptimas, DRIVE Map acelera la implementación de AV, desde la generación de datos de entrenamiento reales para el entrenamiento de redes neuronales profundas, así como para pruebas y validación.
Estos workflows se centran en Omniverse, donde se cargan y almacenan datos de mapas del mundo real. Omniverse mantiene una representación a escala terrestre del digital twin que se actualiza y amplía continuamente mediante vehículos de mapas topográficos y millones de vehículos de pasajeros.
Usando herramientas de generación de contenido automatizadas basadas en Omniverse, el mapa detallado se convierte en un entorno de simulación manejable que se puede usar con NVIDIA DRIVE Sim. Las características como la elevación de la carretera, las marcas viales, las islas, las señales de tráfico, las señales y los postes verticales se replican con precisión a nivel de centímetros.
Con la simulación de sensores físicos y la aleatorización de dominios, los desarrolladores de AV pueden usar el entorno simulado para generar escenarios de entrenamiento que no están disponibles en datos reales.
Los desarrolladores de AV también pueden aplicar herramientas de generación de escenarios para probar el software AV en entornos de digital twins antes de implementar AV en el mundo real. Finalmente, el digital twin brinda a los operadores de flotas una vista virtual completa de dónde se conducen los vehículos en el mundo, lo que ayuda a la operación remota cuando es necesario.
Como una plataforma altamente versátil y escalable, DRIVE Map equipa al conductor de IA con la comprensión del mundo necesaria para avanzar continuamente en las capacidades autónomas.